
JR西日本は豪腕を持った巨大な汎用ヒト型重機で実証実験

西日本旅客鉄道(JR西日本)は、自動改札やホームドアなどを提供する日本信号と協力し、株式会社人機一体の汎用ヒト型重機『零式人機ver.2.0』の実用化を進めています。『零式人機ver.2.0』は2つの豪腕を持った巨大ロボットです。鉄道工事用車両と合体させた重機で、遠隔操作によって高所の電気設備の整備や点検作業などを行えます。
作業員がカゴに乗って高所にある高圧の電気設備を扱う作業には危険が伴うため、汎用ヒト型重機ロボットが普及すれば、作業内容の改善に貢献できると期待されています。

なお、人機一体社はこのほかにも、独自共創モデルの一つである「空間重作業人機社会実装プラットフォーム」を開発し、土木分野および電力分野での高所重作業対応の汎用ロボット重機「空間重作業人機」の社会実装をめざす開発プロジェクトを立ち上げました。23年4月からは、竹中土木や東北電力ネットワーク、日本信号らとの事業連携も進めています。
橋梁工事・メンテナンス作業工程の1つである鋼製ブラケットなどの高重量物の取り付け作業のほか、配電線・柱上変圧器などの配電設備の工事では電気が流れている活線状態で作業が行なわれることも多いため、作業員の墜落や感電といった労働災害を防ぐためにも遠隔操作ロボットが有効だと考えられています。
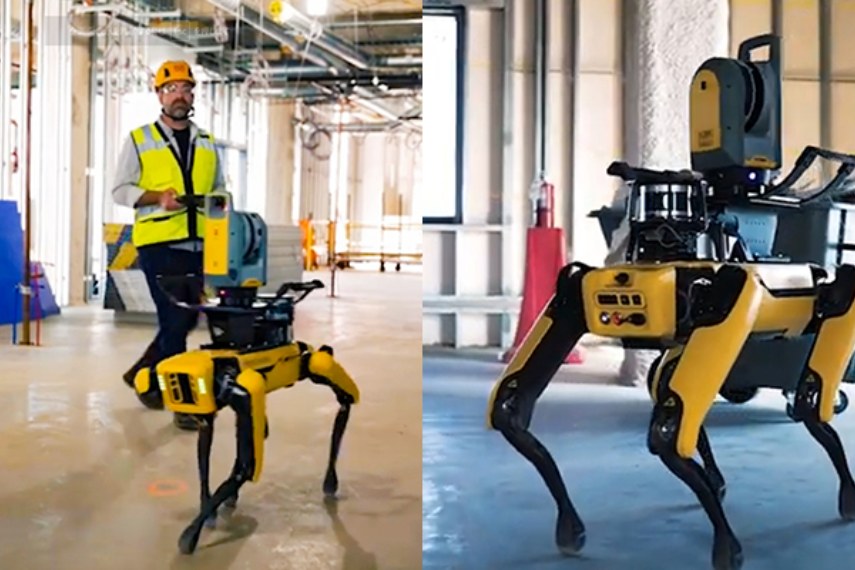
カメラやセンサーを搭載した犬型ロボット『SPOT』
このほか、建設現場や工場・プラント、変電所や発電所などで導入が徐々に進められているのが四足歩行の犬型ロボットです。移動できるロボットは車輪型のものが大半ですが、四足歩行は段差や階段があっても自由に動き回れるのが特徴です。あらかじめ複数のルートをAIに学習させ、自動で巡回させることもできます。

たとえば、身体能力の高さで知られるボストン・ダイナミクスの『SPOT』はロボットハンドのような役目を持つ首と頭、高画質の画像認識と解析が可能なカメラ、有害ガスや空気中の成分を測定するセンサーなどを装備できます。
ロボットハンド機能は、扉(ドア)の開け閉めやレバーハンドルやバルブ(開閉弁)の操作などが可能です。自律的にドアを開閉して巡回しながら、決められたバルブの開閉を操作したり、遠隔操作でスタッフがレバーの開け閉めしたりできます。
また、スタッフは遠隔から『SPOT』に搭載したカメラで、各種計器(センサー)の数値を確認して異常がないか確認したり、AIが数値を判別して異常があったときに通知したりすることもできます。もちろんガスや気体が漏れているのをセンサーで検知した場合にそれを迅速に認識して通知できます。

竹中工務店は『SPOT』を建設現場の実測図作成業務に活用
また、『SPOT』で建設現場内を巡回して撮影した映像を作業の進捗報告に使用する例もあります。竹中工務店は、建設現場内の写真を実測図の作成用データとして用い、実測図(点群データ)と設計図(BIMデータ)の照合に活用する実証実験を『SPOT』で行い、業務の効率化ができることを確認したと発表しました(BIMデータとはBuilding Information Modelingの略称で、PC上で作成した建物の3次元デジタルモデルに、コストや仕上げ、管理情報などのデータを追加したものです)。



犬型ロボット『SPOT』の実証実験では、建設現場巡回や施工状況の遠隔確認と記録、軽量資材の運搬
での活用等で十分に効果が得られることが確認されており、映像撮影に要する時間も最大30%程度削減
できるとしています。
同社は「SPOTのさらなる活用方法の実現をめざした研究開発ならびに墨出しロボット、搬送ロボットなどRXを活用した生産性向上施策の普及展開を図っていきます」とコメントしています。
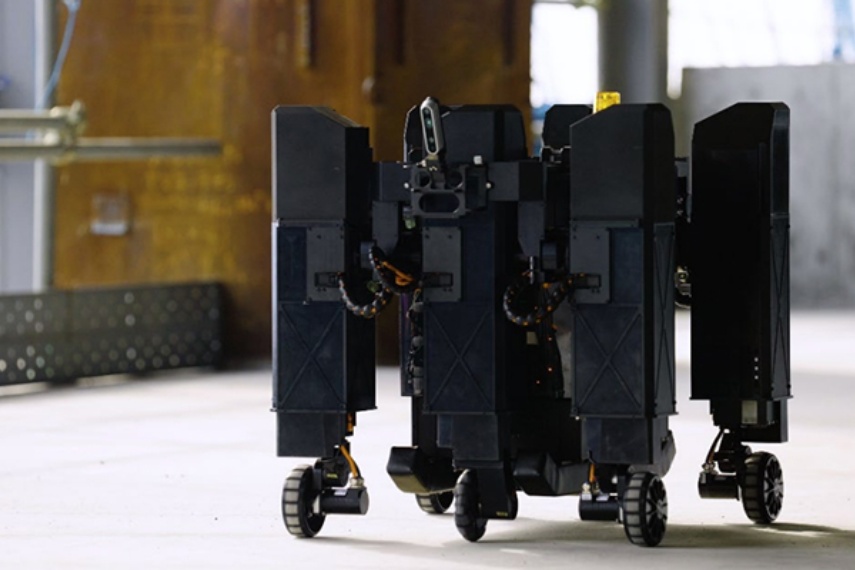
<h1>ソニーグループのR&Dセンターが6脚車輪ロボットを開発
四足歩行ロボットは前述の通り段差や階段に対応できるのが利点ですが、ソニーグループの研究開発組織である R&Dセンターは21年12月、建築テック向けに6脚の車輪ロボットを開発したことを発表しています。
車輪は移動方向の自由度が高いオムニホイールを装備し、平地では車輪で移動できます。段差があるところは、駆動軸16軸の6脚を使い、最大30cmを乗り超えて進めます。こうして、整地・不整地が混在する環境においても、安定かつ高効率に移動できる仕組みです。
ソニーグループは清水建設と連携して、建設現場における巡回・監視などの施工管理業務の効率化を目的に、このロボットの実用化に向けて共同実証実験を約7ヵ月間実施しました。
建設現場や災害現場のような足場の悪いところでは、段差に強い移動機構を持つ犬型ロボットや六脚ロボットが大いに役立ちます。しかし、建物の多くは人間用に作られているため、本来もっとも適したロボットの形態は人型のヒューマノイドということになるでしょう。安定したヒューマノイドの開発は非常に困難ですが、今後はそうしたロボットが多数登場することも期待されています。
<著者>
神崎洋治
TRISEC International代表取締役
ロボット、AI、IoT、自動運転、モバイル通信、ドローン、ビッグデータ等に詳しいITジャーナリスト。WEBニュース「ロボスタ」編集部責任者。イベント講師(講演)、WEBニュースやコラム、雑誌、書籍、テレビ、オンライン講座、テレビのコメンテイターなどで活動中。
1996年から3年間、アスキー特派員として米国シリコンバレーに住み、インターネット黎明期の米ベンチャー企業や新製品、各種イベントを取材した頃からライター業に浸る。
「ロボカップ2018 名古屋世界大会」公式ページのライターや、経産省主催の「World Robot Summit」(WRS)プレ大会決勝の審査員等もつとめる。著書多数。








