
アポロ計画から始まった「自動運転の歴史」

最初に自動運転の歴史について簡単に説明します。自動運転にはレベル0~5までの6段階がありますが、2022年にホンダのフラッグシップカー『レジェンド』が世界初の自動運転レベル3を実現しました。ちなみに自動運転レベル3は、一定条件下においてドライバーのかわりにシステムがすべての運転操作を行うものです。さらに現在、アメリカや中国でレベル4の自動運転タクシーの運用が開始され、サービス提供が本格化しています。
このように自動運転は新しい技術のように思えますが、その構想は米GM(ゼネラルモーターズ)が1940年代に万国博覧会で展示したものが最初とされています。さらに1950年代には、道路に誘導ケーブルを敷設し、それに沿って車両が走行する技術を披露。ただ、あくまで限定された区域の中というのが条件でした。
現在のように広い空間で自由に走行する本格的な自動運転の研究がはじまったのは、1960年代の「アポロ計画」からと言われています。世界初の有人月面着陸を成功させたアポロ計画は有名ですが、そのプロジェクトの中で米スタンフォード大学が遠隔制御技術を研究。自動運転の礎になった『スタンフォードカート』と呼ばれる月面調査用の車両開発を行いました。
その後、日本でも自動運転の研究がスタートし、1970年代に世界初のマシンビジョンを活用した自動運転システム「Intelligent Vehicle:知能自動車」が登場。1980年代に入るとアメリカで自動運転システムにAI(Artificial Intelligence:人工知能)が組み込まれるようになり、2010年代頃からは国内外で自動運転のスタートアップ企業が続々と誕生しています。
JAXA、トヨタ、三菱重工業が開発する「月面調査機」とは?
自動運転の歴史を知ったところで、話題は「アルテミス計画」と月面調査機の開発に戻ります。まずアルテミス計画は、月面有人探査に関するすべてのプログラムを包含したプログラムで、月面探査だけではなく、2030年代に火星への有人着陸を目標に掲げています。
アルテミス計画では、「すべての活動は平和目的のために行われる」ことをはじめとしたアルテミス合意に、米国、日本、カナダ、イタリア、ルクセンブルク、アラブ首長国連邦(UAE)、英国、オーストラリアの8カ国が署名し、現在では33カ国・地域にまで広がっています。
国内に関しては、JAXAのほか、三菱重工やトヨタ、ブリヂストン、タカラトミー、清水建設、鹿島建設などが参画を表明。チームジャパンの協力体制を構築しています。そこで開発が進められているのが、月面環境のデータ取得や実証実験などを行う『月極域探査機LUPIX』です。こちらは、三菱重工が開発を担当しています。
また、有人の月面着陸ミッションのために『月極域探査機LUPIX』から得たデータなどをもとに、開発されるのが「有人与圧ローバ」です。こちらは、トヨタと三菱重工業の連携により現在研究が進められています。そのポイントは、アポロ計画で使われた探査車は運転席がむき出しの非与圧型だったことに対し、こちらは車内で船外用宇宙服を脱いで活動ができる与圧型ということです。与圧式とすることで長期間かつ広範囲の探査を可能にします。
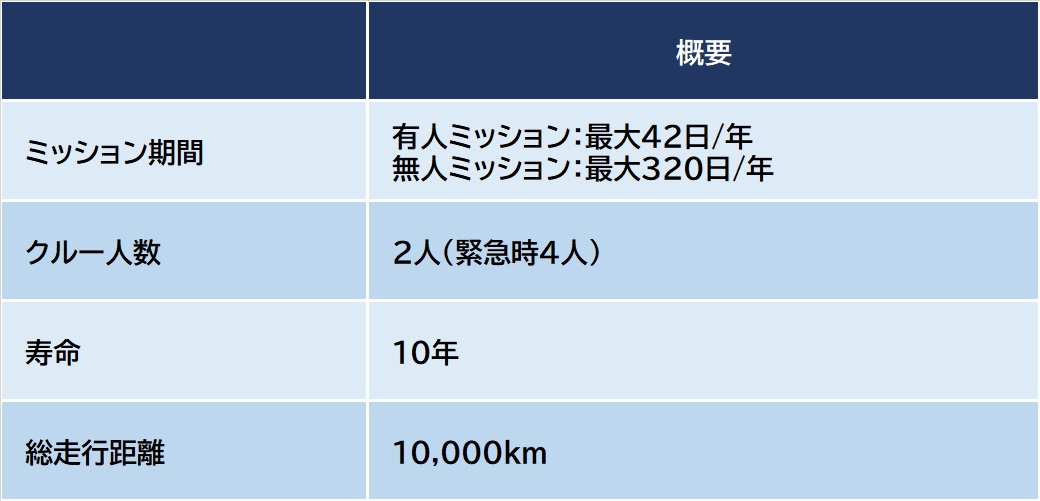
また「有人与圧ローバ」の愛称は、2020年に『ルナクルーザー』に決定。現在開発中の月面探索用モビリティ『ルナクルーザー』の最新デザインは、2023年10月に開催されたJAPAN MOBILITY SHOW 2023で公開されたので、見覚えのある方もいるのではないでしょうか?

日本初の有人月面着陸機で実現する『自動運転技術』
ここからは、有人月面調査車『ルナクルーザー』について、オフロード自動運転の分野について詳しく解説していきます。
月面は、レゴリス(月面砂)やクレーター、岩石、傾斜などにより、非常に過酷な走行環境になっています。それらの課題に対して、トヨタが長年培ったクロスカントリー車『ランドクルーザー』の技術と、ブリジストンが開発する金属タイヤなどを投入で解決の道筋を模索中です。
また、走ったことのない月面を安全に走行するため、オフロード路での自動運転走行の研究も同時に行われています。地球上のカーナビゲーションシステム等は、人工衛星から発信された信号をもとに位置を特定する「GPS(Global Positioning System:全地球測位システム)」を用いて自車の位置情報を測定しています。
しかし、月面ではGPSが利用できないため、電波を用いて自己位置を推定する「電波航法」や恒星の位置から姿勢角を推定する「スタートラッカー」、また三次元加速度から速度や移動量を推定する「慣性航法」などを用いて自己位置を測定。さらに周辺環境を把握するため、近年の自動運転開発で注目を集めている「LiDER(Light Detection And Ranging:光による検知と測距)」を利用し、障害物などを検知します。それらの情報をもとに安全に走行できる経路を生成し、マニュアル運転時のガイドに加え、自動運転の実現を目指しています。
ちなみに、オフロード自動走行の技術については、JAPAN MOBILITY SHOW 2023でも開発段階の技術が公開され、実際にも体験可能でした。会場では原寸大のルナクルーザー車内モックアップが用意され、画面に月面を模した仮想現実(VR)が映し出され、表示された推奨ルートに沿ってステアリング操作を行う体験コンテンツが用意されていました。
上述したオフロード自動運転の技術は、たとえば災害状況の確認であったり、危険な地域への物資輸送であったり、地球上でのモビリティ開発にもフィードバックするとトヨタが発表しています。月での利用を想定して開発された技術が、そう遠くない未来に市販車にも搭載される可能性があります。
月の次は火星!?「アルテミス計画」のロードマップ

アルテミス計画は、『MOON TO MARS CAMPAGN SEGMENTS』と記されているとおり、有人による月面探査の先にある、火星探査まで含めたロードマップを示しています。また、2024年1月に有人月面着陸のスケジュールを2025年末から2026年に延期し、新しいミッションカレンダーも公開されています。それが以下のとおりです。
アルテミス1:2022年に大型ロケット「SLS(Space Launch System)」を使い、無人のオリオン宇宙船(オライオン宇宙船)を打ち上げ、オリオン宇宙船が月周回軌道に入り、地球に帰還。2024年初に終了予定。
アルテミス2:2025年後半に行われるプログラム初の有人ミッション。オリオン宇宙船に4名のクルーが乗り込み、月周辺を飛行したあとに地球へ帰還。
アルテミス3:2026年にプログラム初の有人月面着陸を行うミッション。2名の宇宙飛行士が月着陸船「Starship HLS(スターシップHLS)」に搭乗し、月の南極へ降り立ち、永久影に埋蔵されているとみられる氷の探査。
アルテミス4:2028年に月周回軌道上でゲートウェイ宇宙ステーションとドッキングし、その後、ふたたび月面着陸することを含んだミッション。
NASAは、アルテミス4以降も継続的な月面調査を行い、2030年代の火星有人着陸を目標に掲げています。NASAともにJAXAも以下のような国際宇宙探査のロードマップを示しています。
オフロード自動運転から火星探査と、とても飛躍しているようにも感じますが、2030年代なので10年後と意外と近い未来です。そこで日本の自動車技術が活躍していると思うと、とても誇らしく感じます。最先端の技術が投入される宇宙開発の現場は、自動車産業にとっても重要な開発の場となっており、今後の動向に注目です。
[プロフィール]
三木 宏章(合同会社コンテンツライト)
編集プロダクションにて、月間自動車雑誌の編集者としてキャリアをスタート。出版社に転職後、パソコン・ガジェットを中心したムックを担当。
出版社を退社後は、1年半にわたってバックパッカーをしながら17ヵ国を渡り歩き、帰国後はWEBコンサルティング会社でコンテンツ企画・制作・運用などを担当。その傍ら、コピーライターとしてブランディング事業などにも携わる。
2017年にフリーランスとして独立し、その後、編集プロダクション『合同会社コンテンツライト』を設立。自動車業界を中心に“ものづくり”に関わる多数の企業・メディアで執筆やコンテンツ支援を担当する。








